物体の扱い方を学ぶ人型ロボット
人型ロボットは新しいタスクに苦労しています。新しいアプローチは、家庭、工場、サービス現場で物体を確実に扱うのに役立つ可能性があります。
物体の扱い方を学ぶヒューマノイド ロボットヒューマノイド ロボットは、人間が行う多くのタスクを処理できます。これらのタスクには、物の移動や製品の組み立てだけでなく、掃除、整理、料理などの家事も含まれます。これらのタスクを単独で実行するには、人型ロボットがさまざまな状況でオブジェクトを操作する必要があります。ロボット操作用の現在の機械学習モデルのほとんどは、トレーニングと同様の環境ではうまく機能しますが、新しい状況では困難を伴います。
武漢大学の研究者は、人型ロボットのオブジェクト操作を改善するためのフレームワークである RGMP (リカレント幾何学事前マルチモーダル ポリシー) を作成しました。RGMP は、ロボットがより多くの物体を把握し、より多くのタスクを確実に完了できるようにする可能性があります。
機械学習フレームワークは、幾何学的意味論的推論とヒューマノイド ロボットの視覚運動制御を組み合わせます。このフレームワークは、ロボットの適応性を向上させ、コンテキスト情報を使用しながら、小さなデータセットでトレーニングされた場合でも、複数の設定にわたって信頼性の高いオブジェクト操作を可能にすることを目的としています。
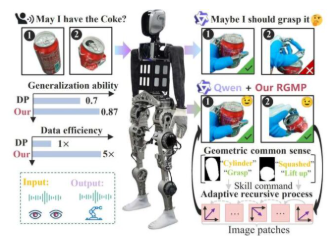
このフレームワークには、幾何学的事前スキル セレクター (GSS) と適応再帰ガウス ネットワーク (ARGN) という 2 つの主要コンポーネントがあります。GSS は、幾何学的事前分布をビジョン言語モデルに統合し、ロボットが物体の形状と位置に基づいてスキルを選択できるようにします。ARGN は、ロボットとロボットが対話するオブジェクトとの間の空間関係を再帰的にモデル化することにより、モーション合成をサポートします。これらのコンポーネントを組み合わせることで、最小限のデータでタスクを実行できるようになり、まばらなトレーニングのデモンストレーションによる課題に対処できます。
このフレームワークは、実験では人型ロボットと双腕デスクトップ ロボットでテストされました。結果は、ロボットがほとんどのシナリオでさまざまなオブジェクトを操作できることを示しました。このフレームワークは一般化されており、最先端のモデルと比較して高い成功率とデータ効率の向上を実現しました。
このアプローチは、ロボットが追加のトレーニングなしで新しい環境に適応する必要があるタスクの自動化をサポートできる可能性があります。潜在的な用途には、家事、サービス提供、手作業による製造プロセスなどが含まれます。今後の取り組みは、タスク全体の一般化を改善し、最小限の人的入力でロボットが新しいオブジェクトの動作軌道を推測できるようにして、動的な環境での教育の必要性を減らすことに焦点を当てます。