モジュール式 3D プリントマイクロロボット
小型で順応性の高いロボットは、モジュール式 3D プリント設計のおかげで、さまざまな地形を歩いたり、泳いだり、協力したりできるようになり、医療や環境モニタリングなどにおける多用途のマイクロ ロボット工学への道を切り開きます。
新世代の 3D プリント マイクロロボットは適応性と機能性において画期的な進歩を遂げており、現実世界の多様な環境でロボット工学がどのように動作できるかを再構築することが期待されています。ソウル国立大学の研究者によって開発されたこれらのモジュール式マイクロロボットは、それぞれ 1 センチメートル未満で、さまざまな表面を歩いたり、泳いだり、さらにはグループで協力したりすることができ、汎用のマイクロスケールロボット工学に向けて大きな飛躍をもたらします。
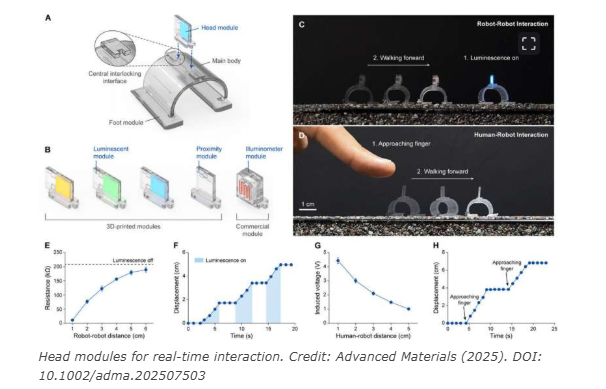
薬物送達や病気の診断などの狭い用途に特化して作られることが多い従来のマイクロロボットとは異なり、これらの新しいシステムはモジュール式アーキテクチャを採用しています。この設計により、研究者やエンジニアはさまざまなタスクに合わせてコンポーネントを交換することができ、ドローン技術に見られる柔軟性を反映しています。各ロボットは、交換可能なモジュールに接続された中心本体で構成されています。脚は、平らな地形、荒れた地形、または水中の地形を移動するためのものです。リアルタイムのインタラクションを目指します。複数のユニットが 1 つの調整された群れとして動作できるようにするコネクタ。
重要な進歩は製造にあります。チームは、1 回の実行で最大 8 台の同一のマイクロロボット ユニットを製造できるカスタム マルチマテリアル 3D プリンターを使用し、拡張性と精度を劇的に向上させました。このプロセスにより、生産が高速化されるだけでなく、オンデマンドのカスタマイズも可能になります。環境モニタリングから対象を絞った生物医学的操作まで、特定のミッションに合わせてモジュールを印刷または再構成できます。
テストでは、マイクロロボットは砂、水、固い地面の上で堅牢な移動を実証し、困難な状況でも安定性と協調性を維持しました。研究者らは、ロボットが高度な制御性を維持しながら、昆虫に見られる自然な適応性を模倣できるようにしたこの多用途性のモジュール設計のおかげだと考えています。
その影響は研究室をはるかに超えて広がります。モジュール式マイクロロボティクスにより、最終的にはマイクロマシンの群れが狭い空間や危険な空間を移動したり、低侵襲手術を支援したり、環境研究で分散センシングを実行したりできるようになる可能性がある。3D プリンティング プロセスは、商業化に向けて不可欠なステップである、手頃な価格での大規模生産への道も開きます。
ソウル国立大学の研究は、モジュラーアーキテクチャと高度な 3D プリンティング材料を融合することにより、マイクロロボットが単なる小さな専門家ではなく、ほぼすべての環境で動作できる動的で汎用的なシステムとなる未来を示唆しています。