スナップスルーはソフトロボットモーションを高めます
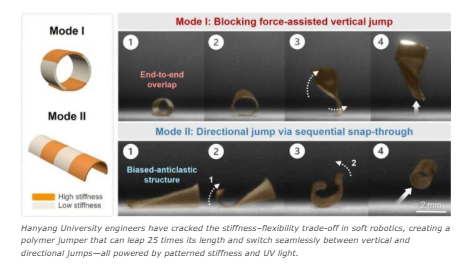
Hanyang Universityのエンジニアは、ソフトロボット工学の剛性と柔軟性のトレードオフをクラックし、その長さ25倍跳躍し、パターン化された剛性と紫外線を搭載した垂直と方向のジャンプの間でシームレスに切り替えることができるポリマージャンパーを作成しました。
Hanyang Universityのエンジニアは、ソフトマテリアルモーションの長年のトレードオフを克服するために、ヘアクリップ、格納式ペン、および金星のフライトラップに馴染みのある現象であるスナップスルー効果を活用しています。Science Advancesで掲載された彼らのブレークスルーは、均一な紫外線(UV)光の下で高い垂直飛躍と正確な方向ジャンプの両方を達成するポリマーベースのジャンパーを示しています。
ソフトロボットとアクチュエーターは、しばしば剛性と柔軟性のバランスと格闘しています。硬い材料はエネルギーを保存できますが、曲げに抵抗しますが、より柔らかいものは簡単に曲がりますが、力が少なくなります。Jeong Jae(JJ)Wie教授が率いるHanyangチームは、単一の液晶ポリマーフィルムにさまざまな剛性のパターンを埋め込むことでこれを解決しました。
結果:スナップスルートランジションを使用しているジャンパー(蓄積された弾性エネルギーを急速に変換する湾曲のサッデンシフト)は、記録設定パフォーマンスを実現します。硬い領域が中央に配置された場合、デバイスはその長さの約25倍まで最大49 mmまで垂直に推進しました。硬い領域が角に非対称に配置されたとき、ジャンパーは角度のある光や外部ガイダンスを必要とせずに紡がれ、方向に跳躍しました。
研究者はさらに、「デュアルモード」ジャンパーで設計を進めました。フィルムを拡張し、硬いセグメントとソフトセグメントを交互に拡張することにより、単一のシーケンスで垂直方向の動きと方向性の動きを迅速に切り替えることができました。これは、ポリマーベースのソフトロボットではめったに見られない汎用性です。フィルムがどのように変形したかに応じて、指のような跳躍で上向きにスナップしたり、徐々にアーチに向かって方向性の移動を生成したりできます。
このイノベーションは、生物学と双安定メカニクスからの原則を、増幅された性能のために柔らかい素材に設計する方法を強調しています。ジャンプロボットを超えて、このアプローチは、生物医学ツールから適応ソフトマシンまで、強力でありながら正確な動きを必要とするアクチュエーターとデバイスの道を開くことができます。自然なインスピレーションとパターン化素材のデザインを組み合わせることで、衛生大学のチームは、スナップスルーメカニクスがソフトロボティックスの厳しい挑戦の1つを解くための鍵であることを実証しました。