コンピューターなしで機能するソフトロボット
電子機器のないオブジェクトを移動、持ち上げ、感知するロボットが可能になりました。彼らは、予測可能な方法でスナップして曲がる材料を使用して動作します。
ソフトロボットは通常、コンピューター、センサー、バッテリーに依存しており、極端な環境や到達が困難な環境での使用を制限し、空間、深い水中、核サイトなどです。Purdue Universityの研究者は、エレクトロニクスなしで身体的行動を通して完全に動作するロボットを設計することにより、この問題に取り組んでいます。
このアプローチでは、構造が2つの安定した位置で休むことができる双安定性を使用します。この現象は、自然界で一般的です。たとえば、イヤーウィッグの折りたたみ可能な翼や金星フライトラップの葉を閉めるメカニズムです。エンジニアは、エネルギーを蓄積し、仕事を実行し、さらには機械的なコンピューターとして機能することができるプログラム可能な構造を作成するために双安心を使用しています。
重要な材料の1つは、2つの状態の間をスナップするメタマテリアルドームであるフィジェットポッパーです。複数のドームを組み合わせることにより、研究者はソフトロボットの形状と動きを正確に制御できます。ドームは3Dプリントされた熱可塑性ポリウレタンで作られており、メタステーティーシュが一時的な状態を可能にし、ロボットが時間依存の応答を持つことができます。
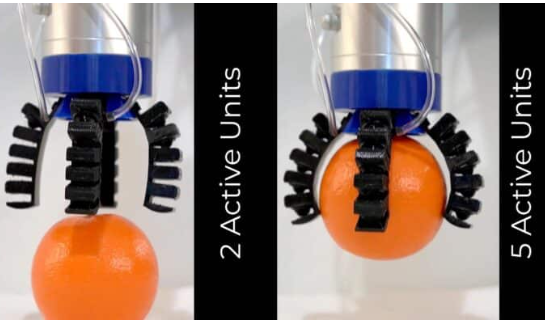
2種類のロボットがこれらの原則を示しています:グリッパーとウォーカー。グリッパーは、双安定ドームを使用して、コンピューターなしでさまざまなサイズとウェイトのオブジェクトを感知および持ち上げます。オブジェクトが重すぎてオブジェクトをリリースしている場合にのみ、追加のドームが関与します。ウォーカーは、さまざまな角度で配置されたドームを完全に物理的なデザインでシーケンスするドームをシーケンスすることにより、前方に移動または回転します。
これらのロボットも堅牢です。グリッパーのドームが損傷している場合でも、双安定構造の固有の特性により、腕が機能し続けます。
双安定性を活用することにより、研究者は、従来のロボットにとって極端な環境またはアクセス不可能な環境で動作できるロボットを作成し、宇宙、原子炉、または深い水中運転の用途向けのソリューションを提供することを目指しています。