レーダーの死角を解決する
私たちは皆、レーダー システムについてよく知っています。しかし、レーダー システムは、特に複数の物体が存在する場合、同様の速度で移動するターゲットを正確に検出して区別するのに苦労することが多いことをご存知ですか。この制限により精度が低下し、目標ミス率が増加するため、安全かつ効果的な運用のために高解像度レーダーに依存する UAV、無人船舶、自動運転車、その他のインテリジェント プラットフォームにとって課題が生じます。
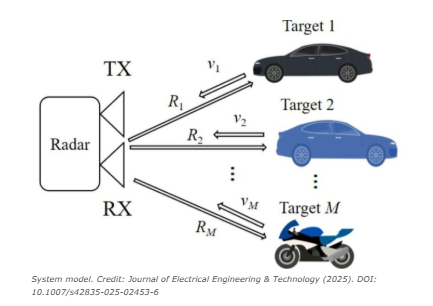
大邱慶北科学技術院の研究チームは、この問題に取り組むため、周波数変調連続波(FMCW)レーダー用のドップラー分解能強化アルゴリズムを開発した。このアルゴリズムにより、追加のハードウェアや複雑な計算を必要とせずにレーダー検出の精度が向上し、リアルタイムの展開に適しています。
従来のレーダー システムは、高速フーリエ変換 (FFT) を利用してターゲットの速度を測定しますが、FFT の分解能には限界があります。これを克服するために、チームは信号外挿技術を適用し、観測時間を増やさずにドップラー分解能を向上させる新しいアルゴリズムを作成しました。
この方法は、速度推定における二乗平均平方根誤差を最大 33% 削減し、目標ミス率を最大 68% 低下させ、従来のアプローチに比べて明らかな改善をもたらします。標準の FFT 手法と同じ計算複雑さを維持し、高速かつ効率的な処理を実現します。